Source-first digest for checked paper rank 25, rank_id p035.
- Routing status:
pandoc_failed - PDF extraction: not used
Motivation / Background
NeuROK targets a gap between static 3D object generation and physically plausible 4D object motion. The paper argues that most prior 4D simulation systems choose a predefined kinematic or physical model first, then identify parameters for a particular object class such as cloth, articulated objects, elastic bodies, or continuum bodies. That makes them hard to scale to heterogeneous dynamic objects because the system must know the dynamic structure before simulation.
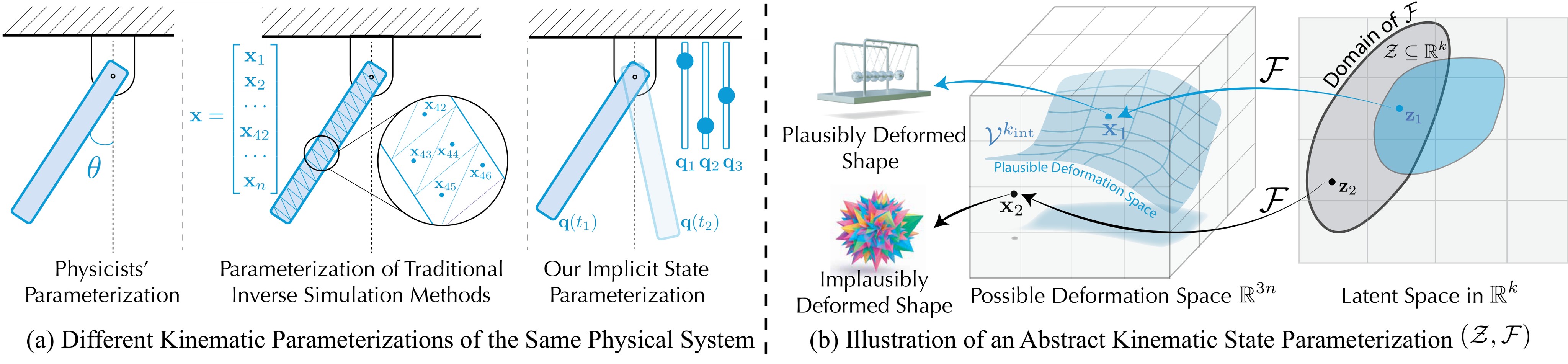
The paper reframes the problem around kinematic state parameterization. Instead of simulating dense mesh particles directly, it learns a low-dimensional latent manifold whose states decode to plausible deformations of the input mesh. Figure 1 is the key conceptual figure: it contrasts symbolic coordinates, geometry-derived particle coordinates, and the learned pair \((\mathcal{Z}, \mathcal{F})\).
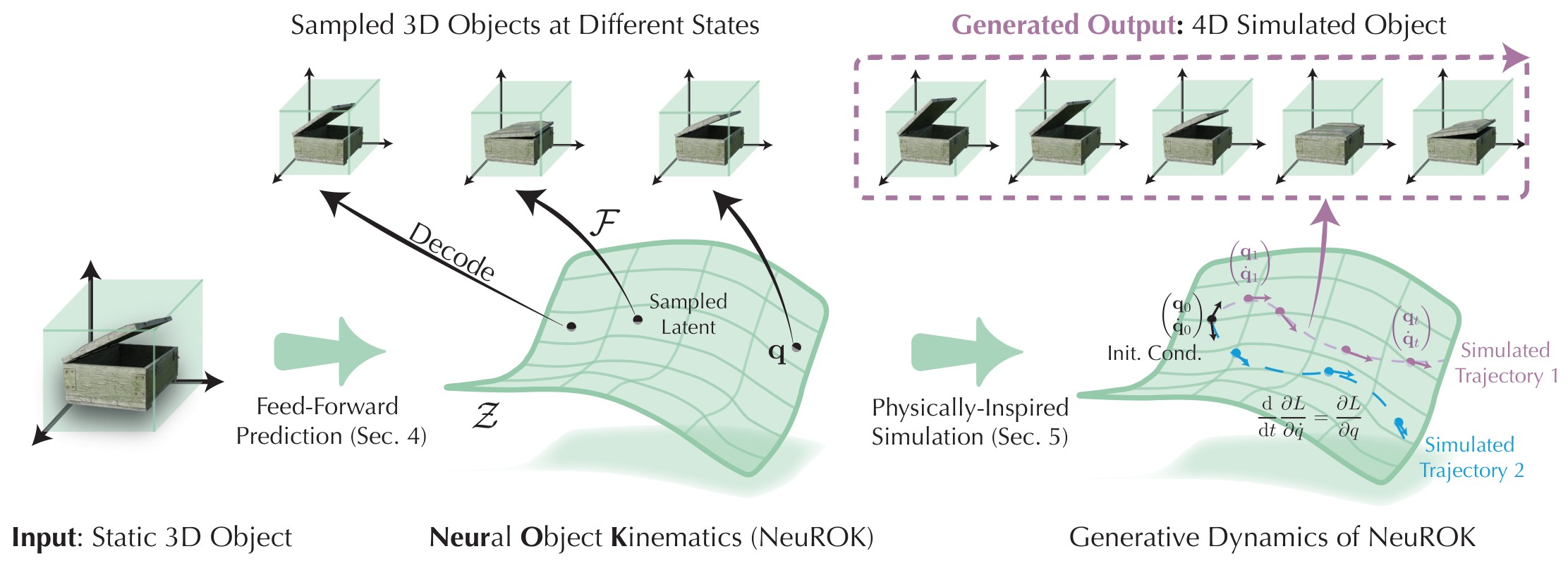
The full pipeline in Figure 2 uses that learned latent space as generalized coordinates for a physically inspired simulator. Given a static mesh and physical conditions such as actions, forces, or initial velocities, the model generates a sequence of deformed meshes through latent-space dynamics, then decodes those latents back to shapes.
Claims And Evidence
| Claim id | Main claim | Support | Evidence anchors |
|---|---|---|---|
| C1 | A learned neural kinematic state parameterization can replace dense, geometry-derived simulation state spaces for many object-centric 4D generation cases. | 4 | parameterization, method, inverse-kinematics results |
| C2 | A transformer-based conditional VAE can infer an instance-specific deformation prior from a static mesh and decode sampled latents into plausible deformations. | 4 | generative learning, training objective, ablation |
| C3 | Once the latent parameterization is learned, 4D dynamics can be generated by solving a physically inspired Euler-Lagrange ODE in latent space. | 3 | latent dynamics, 4D generation table, energy analysis |
| C4 | NeuROK outperforms prior deformation and articulation baselines on inverse-kinematics reconstruction for PartNet-Mobility test objects. | 5 | inverse-kinematics table, qualitative kinematics |
| C5 | NeuROK produces more plausible and visually realistic physically inspired 4D motion than the compared baselines across the paper's evaluated objects. | 4 | 4D generation table, qualitative 4D comparison |
| C6 | The learned dynamics transfer beyond synthetic training cases to real-captured objects and held-out object categories. | 3 | real objects, unseen categories |
| C7 | Model reduction, data augmentation, and the deformation parameterization each contribute meaningfully to performance. | 4 | ablation, inverse-kinematics table |
Scores are support-from-paper scores, not reproduction scores. I cap the broader simulation and generalization claims because the paper's quantitative evidence emphasizes plausibility, user preference, and benchmark metrics rather than direct physical ground-truth trajectory accuracy across a large real-world test set.
Core Technical Idea
The key move is to make the kinematic state of a deformable object learnable. The input object is represented as a mesh \(\mathcal{M}_0=(V_0,F)\) with \(n\) vertices. A generated motion is a sequence of deformed meshes \(\{\mathcal{M}_1,\ldots,\mathcal{M}_T\}\), with vertex positions \(\mathbf{x}^t \in \mathbb{R}^{3n}\).
The paper assumes the valid deformations of a dynamic object lie on a much smaller configuration manifold embedded in \(\mathbb{R}^{3n}\). A kinematic state parameterization is:
NeuROK is the neural version of this pair: \(\mathcal{F}\) is represented by a neural decoder, and its range is intended to stay on the manifold of plausible object configurations. If this works, a simulator no longer has to solve dynamics in dense particle coordinates or add category-specific constraints to keep the mesh valid; it can solve trajectories in \(\mathcal{Z}\), then decode each latent state to a mesh.
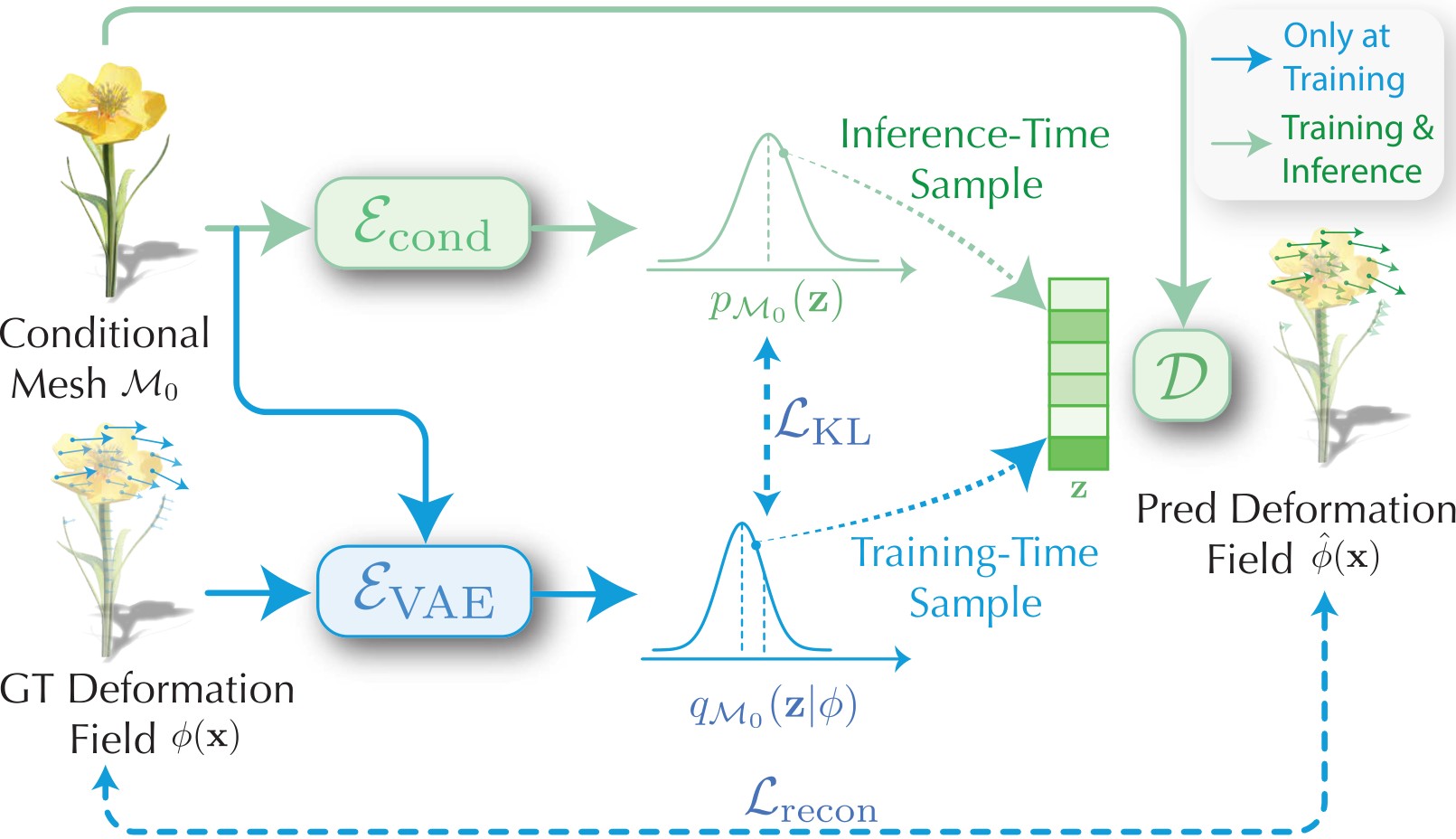
Figure 3 shows the learned part. NeuROK trains a conditional variational auto-encoder with three transformer-backed components:
- A kinematic prior encoder \(\mathcal{E}_{\mathrm{cond}}(\mathcal{M}_0)\), which maps the static input mesh to parameters of an instance-specific latent prior \(p_{\mathcal{M}_0}(\mathbf{z})\).
- A variational deformation encoder \(\mathcal{E}_{\mathrm{VAE}}(\phi,\mathcal{M}_0)\), which observes a deformation field during training and estimates a posterior \(q_{\mathcal{M}_0}(\mathbf{z}\mid\phi)\).
- A deformation decoder \(\mathcal{D}(\mathbf{z},\mathcal{M}_0)\), which maps latent tokens plus surface query points to deformation vectors and then drives mesh vertices from nearby sampled points.
Method Details
Training The Neural Kinematic Space
Training uses pairs of frames from a deformation sequence. The first mesh is the conditioning mesh \(\mathcal{M}_0\); the deformation from the first frame to the second is the target \(\delta_{\mathrm{sample}}\). The model predicts \(\delta_{\mathrm{pred}}\) and is trained with a conditional VAE objective:
with \(\lambda=0.01\). The source says the dataset is curated from PartNet-Mobility, Objaverse, and physical simulation, and that the model is trained only from 4D geometric trajectories rather than explicit force, material, or action labels.
The architecture details matter because the method is meant to scale across object types. The prior encoder samples points from the input mesh surface, applies position embeddings, then uses a Perceiver-style transformer with learnable tokens. The posterior encoder uses sampled deformations plus mesh points. The decoder reshapes \(\mathbf{z}\) into latent tokens, attends over query surface points, predicts deformation vectors, and transfers them to mesh vertices.
Dimension Reduction
The raw VAE latent can be high-dimensional, so NeuROK compresses it to a smaller latent \(\mathcal{Q}\subseteq\mathbb{R}^{k_q}\), with \(k_q \ll k\), using the Active Subspace Method. The source describes a surrogate function:
where rows of \(A\) identify latent directions that matter for the predicted deformation. Here \(G\) is defined from the 2-norm of \(\delta_{\mathrm{pred}}\) over sampled points. This is the part that turns the learned VAE state into a compact coordinate system for later dynamics.
Latent-Space Dynamics
NeuROK treats the learned latent coordinates as generalized coordinates. For a Lagrangian \(L(\mathbf{z},\dot{\mathbf{z}})=T(\mathbf{z},\dot{\mathbf{z}})-V(\mathbf{z})\), the usual Euler-Lagrange relation is:
The paper's latent-space dynamics equation is:
where \(G(\mathbf{z})=J_{\mathbf{z}}^T J_{\mathbf{z}}\), \(J_{\mathbf{z}}\) is the Jacobian of the decoder \(\mathcal{F}\), and \(C_i=m\sum_{j,k}\Gamma_{ijk}(\mathbf{z})\dot{\mathbf{z}}_j\dot{\mathbf{z}}_k\). The paper refers the derivation to the supplement and solves the ODE numerically.
Boundary conditions such as actions or initial velocities are incorporated by optimizing the initial latent state and velocity:
After this optimization, \((\mathbf{z}_0,\dot{\mathbf{z}}_0)\) initializes the latent ODE, and the decoded trajectory gives the generated 4D mesh sequence.
Experiments And Results
Learning Object Kinematics
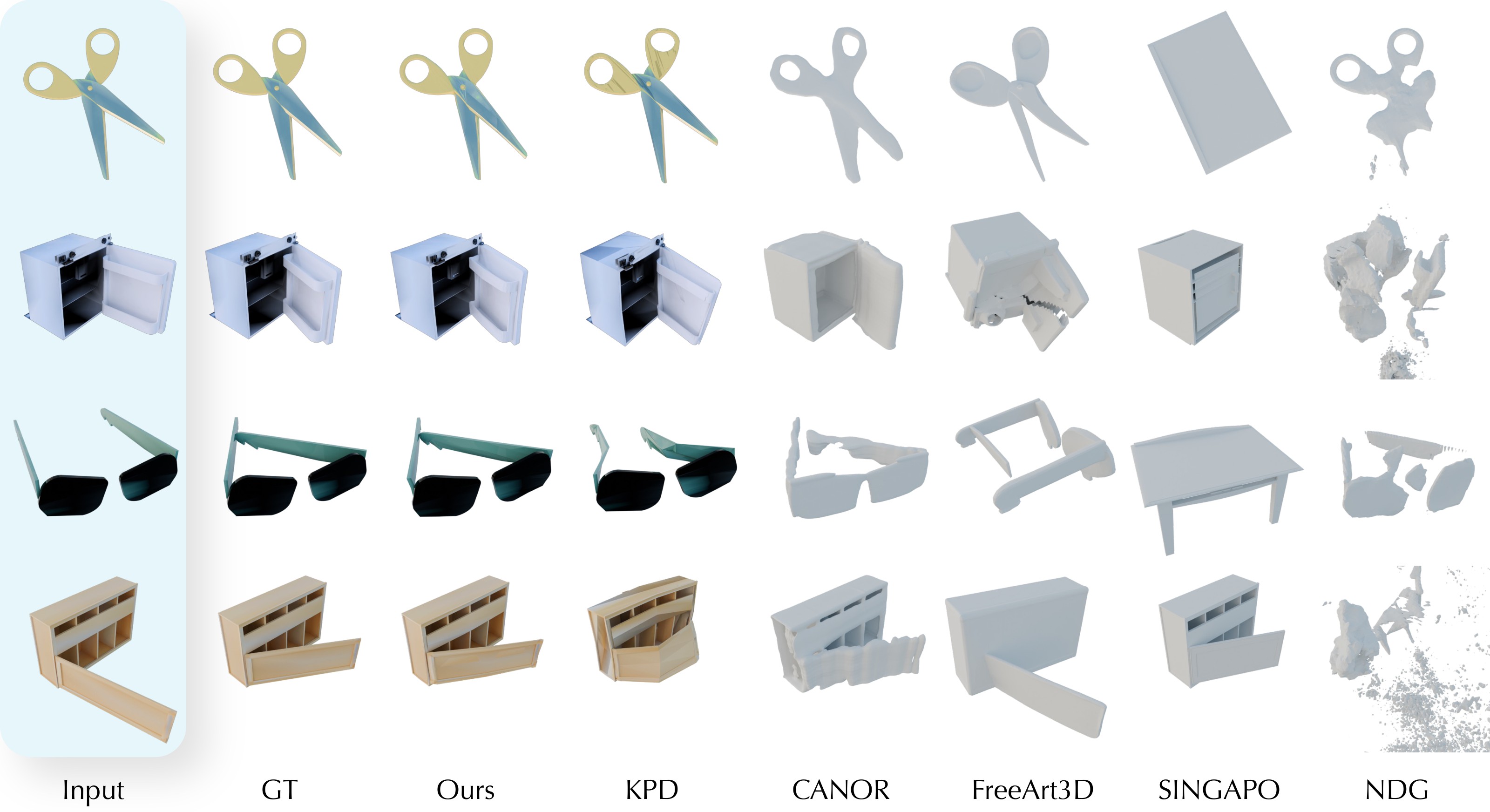
The first experiment asks whether the learned latent state space is compact and smooth enough for inverse kinematics. Given an input object and a target pose of the same object, the method estimates an initial latent state, optimizes the best matching latent, decodes it, and compares the resulting shape with the target. The qualitative evidence is Figure 4, and the quantitative evidence is Table 1.
| Method | Chamfer L1 down | Chamfer L2 down | IoU up |
|---|---|---|---|
| NeuralDeformationGraphs | 0.670 | 0.724 | 0.289 |
| SINGAPO | 0.313 | 0.200 | 0.091 |
| FreeArt3D | 0.169 | 0.139 | 0.354 |
| CANOR | 0.082 | 0.067 | 0.568 |
| KeyPointDeformer | 0.067 | 0.067 | 0.570 |
| NeuROK | 0.028 | 0.028 | 0.764 |
| NeuROK w/o model reduction | 0.045 | 0.059 | 0.711 |
| NeuROK w/o data augmentation | 0.036 | 0.041 | 0.724 |
| NeuROK w/o dual-quaternion | 0.033 | 0.037 | 0.728 |
Table 1. Quantitative inverse-kinematics comparison. NeuROK has the best Chamfer and IoU scores in the reported PartNet-Mobility test, and the ablations show worse results when model reduction, data augmentation, or the dual-quaternion deformation parameterization is removed.
The ablation part of Table 1 is especially useful: it says the compact latent reduction is not just an efficiency add-on, because removing it raises Chamfer L1 from 0.028 to 0.045 and lowers IoU from 0.764 to 0.711. Removing data augmentation or dual-quaternion deformation also hurts, but less severely.
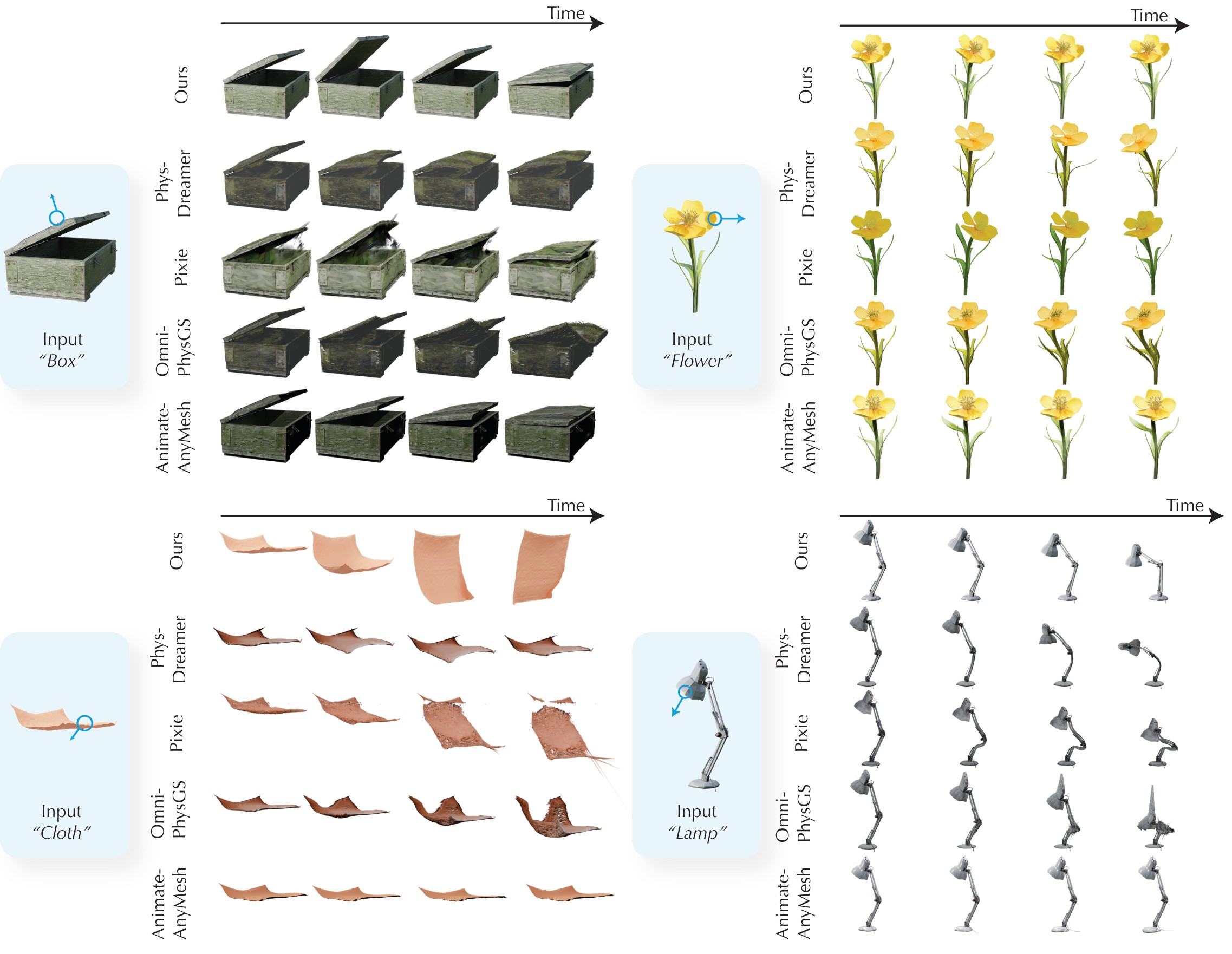
Physically Inspired 4D Generation
For 4D generation, the paper compares NeuROK with PhysDreamer, OmniPhysGS, Pixie, and AnimateAnyMesh. Figure 5 is the qualitative comparison under single-shape plus action conditioning, while Table 2 gives the preference and benchmark metrics.
| Method | Alignment up | Realism up | AQ up | DD up | IQ up | CLIP up | MM up |
|---|---|---|---|---|---|---|---|
| PhysDreamer | 5.95% | 5.36% | 0.362 | 0.500 | 48.432 | 0.716 | 0.783 |
| OmniPhysGS | 1.67% | 0.48% | 0.380 | 0.625 | 48.937 | 0.690 | 0.544 |
| Pixie | 5.12% | 4.17% | 0.392 | 0.625 | 46.177 | 0.659 | 0.857 |
| AnimateAnyMesh | 5.83% | 6.67% | 0.450 | 0.625 | 48.370 | 0.730 | 0.889 |
| NeuROK | 81.43% | 83.33% | 0.483 | 0.750 | 51.100 | 0.761 | 2.343 |
Table 2. Quantitative physically inspired generation comparison. The source reports a 105-user study for alignment and realism, plus VBench metrics for aesthetic quality, dynamic degree, and imaging quality, and WorldScore metrics for CLIP and motion magnitude.
The numerical margin in Table 2 is large, especially on user preference: NeuROK receives 81.43% alignment and 83.33% realism preference, while each baseline is below 7% in both columns. The caveat is that these are plausibility and visual-quality metrics for an ambiguous generative task, not direct verification against measured ground-truth physical trajectories.
Figure 6 extends the qualitative evidence to real-captured objects.

Analysis And Generalization
The physical-consistency analysis in Figure 7 checks energy behavior under the Euler-Lagrange formulation.
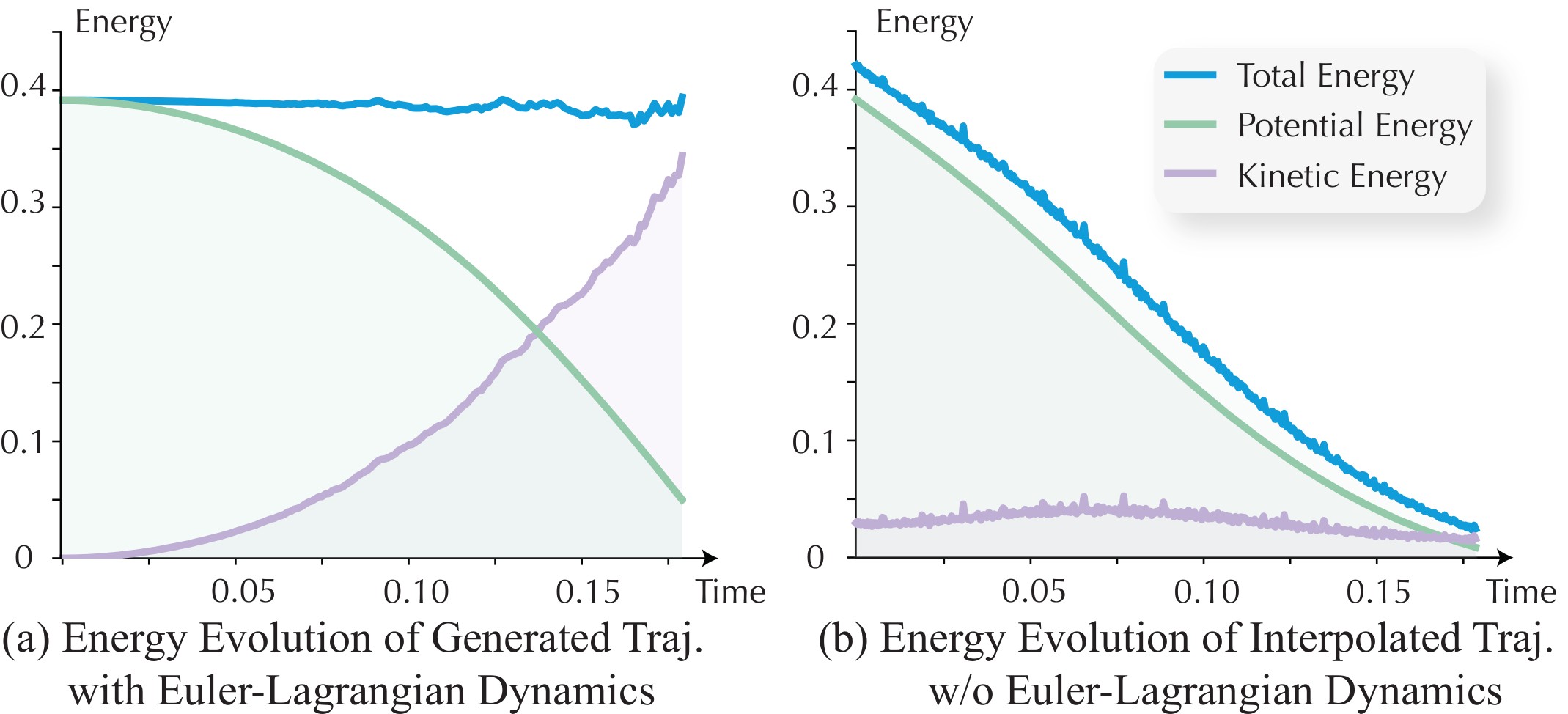
Figure 8 tests a model variant trained only on PartNet-Mobility categories and then applied to unseen categories.

Practical Takeaways
NeuROK is most useful as a representation idea: learn a deformation manifold first, then perform dynamics in that learned coordinate system. For researchers building 4D world models, the reusable pattern is the split between a geometric latent state parameterization and a downstream dynamics solver.
The strongest evidence is the inverse-kinematics table. It directly measures reconstruction quality and shows clear gains over deformation and articulation baselines. The 4D generation evidence is also favorable, but it relies heavily on preference and visual-quality metrics because the task is underdetermined.
The main technical weakness is that the paper's physical validity is not proven by the reported metrics. Energy conservation and qualitative realism help, but they do not establish that the generated dynamics match the real physics of a particular object under measured forces. The method should be read as a strong generative simulator for plausible object motion, not as a verified physical simulator.
Follow-up questions worth checking in the supplement or code are the exact dataset composition, the ODE solver details, the active-subspace implementation, and whether the latent dynamics remain stable over longer rollouts or under more quantitative physical tests.